

Latest from Pro-Line:
Earlier this year, Pro-Line was approached for a special project by a University of Kansas senior named Will Pro who is studying Mechanical Engineering.
The design project is entitled the KU “EcoHawks,” and it involved the designing, building, and testing of small-scale remote-controlled vehicles. His group designed a 1:8 scale parallel hybrid vehicle.
Pro-Line was commissioned to provide a few sets of tires, wheels and a body for static/kinetic friction coefficient comparisons, as well as drive train efficiency comparisons and wind tunnel comparisons.
http://groups.ku.edu/~ecohawks/pprfi…oster_SP10.pdf
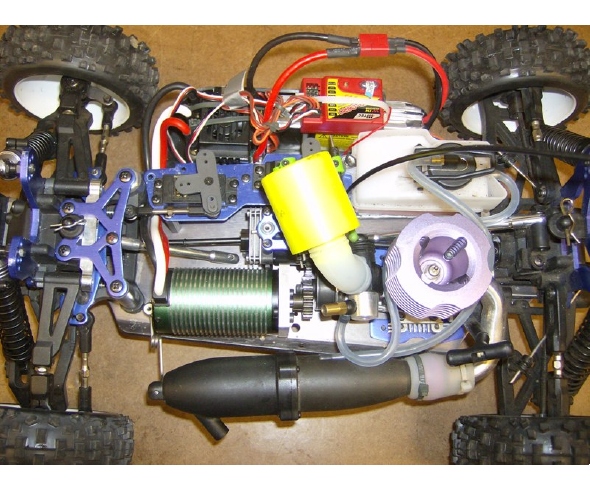
Will said, “The car was tested with the electric motor only and it reached speeds near 40mph (2250kV motor w/ 11.1V batt.)! We were able to relocate the fuel tank in order to create space for the 1/8 scale electric motor. The motor mount was custom CNC machined by our team, and a differential was installed in between the two sources in order to average the speeds of each source.”
Q: Can the car run on just the electric motor or just the nitro engine with this new setup?
A: Yes. We attached one-way bearings to each output shaft of the differential, which allow us to achieve this. When one source is running, the resistance from the car tries to hold the input gear in place. When you hold a differential in place and spin one of the shafts, the other shaft tries to spin in the opposite direction. However, the one-way bearing prevents this from happening and subsequently propels the car forward. Without the one-way bearings, the car would not be able to move because the opposite shafts wouldn’t have anything to catch on.
Q: Why is the gear on the additional differential so big? Isn’t this going to seriously hurt your acceleration?
A: Theoretically no. In our case, the additional differential is acting as the pinion gear. Our previous pinion was 22T, and the differential (acting as the new pinion) is 44T. However, when only one source is running, the differential has an internal gear ratio of 1:2. Thus, the effects cancel each other out; the gear ratio is with the larger main gear, but halved through the differential. When both sources are running, the torque is doubled (IC engine + electric motor). Thus it is ok to have 2x the gear ratio because we have 2x the torque. Theoretically, this will also double our top speed, although this has not been tested yet.
Q: How do you control the IC engine and the electric motor?
A: Currently, we use a 4-channel radio system. Moving the left joystick up and down controls the IC engine speed. Moving the right joystick up and down controls the electric motor speed. Moving the right joystick left and right controls the steering.
Q: So you added another gear to the entire assembly, wouldn’t this flip the direction of the car? The IC engine can’t be reversed, so how did you keep the car from always going backwards?
A: Originally, we had two proposed solutions for this. Adding another gear to the entire driveline would re-reverse the direction of the car, and make it go forward. Our other solution was to flip the entire differential assembly 180 degrees, thus reversing the direction of rotation of the IC engine (the ESC could be programmed to run in reverse). However, we were able to find a way to manually switch the direction of the car without doing either of these. Inside of the front and rear gearboxes are 2 bevel gears meshing at 90 degrees. In order to flip the direction of rotation, we simply removed the differentials and rotated them 180 degrees. This way, the gears on the front/rear differentials were on opposite sides relative to the input bevel gear. Thus, the direction was reversed without any serious modification.
See the car in action at https://www.youtube.com/watch?v=N-S8BXsis9c
Trevor “Chilly” Duncan
Online News Editor
Radio Control Car Action
rccanews@airage.com
https://www.rccaraction.com




![RC Car Action - RC Cars & Trucks | This 1/3 scale 125cc V10 Buggy is CRAZY [VIDEO]](https://www.rccaraction.com/wp-content/uploads/2018/05/V10-HP.jpg)


 Stay up to date with the latest information, sign up for our FREE newsletter today.
Stay up to date with the latest information, sign up for our FREE newsletter today.
